Project Goals
Marker based detection
- Extract keypoints and descriptors from a marker image.
- Match the marker with live webcam footage in real time.
- Enhance robustness of matching.
- Overlay marker image on detected locations
- Compare performance
#Import the necessary libraries
import cv2
import numpy as np
import pandas as pd
import matplotlib.pyplot as plt
import os
import time
2. Create a marker image
#read the image and change to grayscale for detect the marker
image = cv2.imread('chariot.jpg', cv2.COLOR_BGR2GRAY)
#show the original image
plt.imshow(cv2.cvtColor(image, cv2.COLOR_BGR2RGB))
plt.title("Original Image")
plt.axis("off")
plt.show()
# extract the keypoints and descriptors from image
sift = cv2.SIFT_create()
keypoints_marker, descriptors_marker = sift.detectAndCompute(image, None)
#save the marker imgae with detected keypoints visualized
output_image = cv2.drawKeypoints(
image,
keypoints_marker,
None,
flags=cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS
)
#save the marker image
cv2.imwrite('marker_image_chariot_sift.jpg', output_image)
#visualize the marker image
plt.imshow(cv2.cvtColor(output_image, cv2.COLOR_BGR2RGB))
plt.title("Marker Image with Keypoints_SIFT")
plt.axis("off")
plt.show()
# extract the keypoints and descriptors from image
orb = cv2.ORB_create()
keypoints_marker, descriptors_marker = orb.detectAndCompute(image, None)
output_image = cv2.drawKeypoints(
image,
keypoints_marker,
None,
flags=cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS
)
#save the marker image
cv2.imwrite('marker_image_chariot_orb.jpg', output_image)
#visualize the marker image
plt.imshow(cv2.cvtColor(output_image, cv2.COLOR_BGR2RGB))
plt.title("Marker Image with Keypoints_ORB")
plt.axis("off")
plt.show()
As we can see above, due to the difference in keypoint detection methods, the keypoints are detected differently in the marker image.
ORB quickly finds corners based on the FAST algorithm. Since it is designed for real-time processing, it detects a limited number of keypoints to maintain speed.
SIFT finds keypoints in various sizes and scales in the image. It finds strong features in all areas of the image using the DoG method. Keypoint detection is not limited, and all possible keypoints are explored.
Considering these differences, I will choose SIFT for its ability to guarantee high matching accuracy in various environments and proceed with real-time matching.
2. Matching Descriptor
Matching is a problem of finding pairs corresponding to the same location of the same object when a set of
dc1extracted from an image and a set ofdc2extracted from a video shown by a real-time webcam are given.Since the marker image has an object alone, a relatively reliable descriptor is detected, and since the video contains multiple objects, there are many descriptors and a lot of noise.
Brute-Force Matching (BFMatcher) is a method that compares all possible matches between two sets of descriptors.
I use BFMatcher with the knn matching strategy. The algorithm identifies the descriptor
dc2jin the real-time video that has the shortest distance to the descriptordc1ifrom the marker image. If the condition
[ d(dc1i, dc2j) < T ] is satisfied, the pair is considered a match.
def initialize_marker(marker_path):
marker_image = cv2.imread(marker_path, cv2.IMREAD_COLOR)
gray_marker_image = cv2.cvtColor(marker_image, cv2.COLOR_BGR2GRAY)
sift = cv2.SIFT_create()
keypoints_marker, descriptors_marker = sift.detectAndCompute(gray_marker_image, None)
print(f"Initialized marker image '{marker_path}'.")
return marker_image, gray_marker_image, keypoints_marker, descriptors_marker
marker_path = 'marker_image_chariot.jpg'
marker_image, gray_marker_image, keypoints_marker, descriptors_marker = initialize_marker(marker_path)
#make a directory for saving results
output_dir = "captures"
os.makedirs(output_dir, exist_ok=True)
frame_count = 0
Real-time matching
#start webcam
cap = cv2.VideoCapture(0)
#initialize Brute-Force matcher
bf = cv2.BFMatcher()
while True:
#capture a frame from the webcam
ret, frame = cap.read()
if not ret:
break
gray_frame = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
#detect keypoints and descriptors in the current frame
keypoints_frame, descriptors_frame = sift.detectAndCompute(gray_frame, None)
# keypoint matching - knn matching strategy
matches = bf.knnMatch(descriptors_marker, descriptors_frame, k=2)
good_matches = []
for m, n in matches:
if m.distance < 0.75 * n.distance:
good_matches.append(m)
#visualize
frame_with_matches = cv2.drawMatches(
marker_image,
keypoints_marker,
frame,
keypoints_frame,
good_matches, None,
flags=cv2.DrawMatchesFlags_NOT_DRAW_SINGLE_POINTS
)
cv2.imshow('Matches', frame_with_matches)
key = cv2.waitKey(1) & 0xFF
if key == 27:
print("ESC pressed. Exiting.")
break
elif key == ord('c'): #capture the img by pressing 'c'
frame_count += 1
capture_path = os.path.join(output_dir, f"capture_{frame_count}.jpg")
cv2.imwrite(capture_path, frame_with_matches)
print(f"Captured and saved: {capture_path}")
cap.release()
cv2.destroyAllWindows()
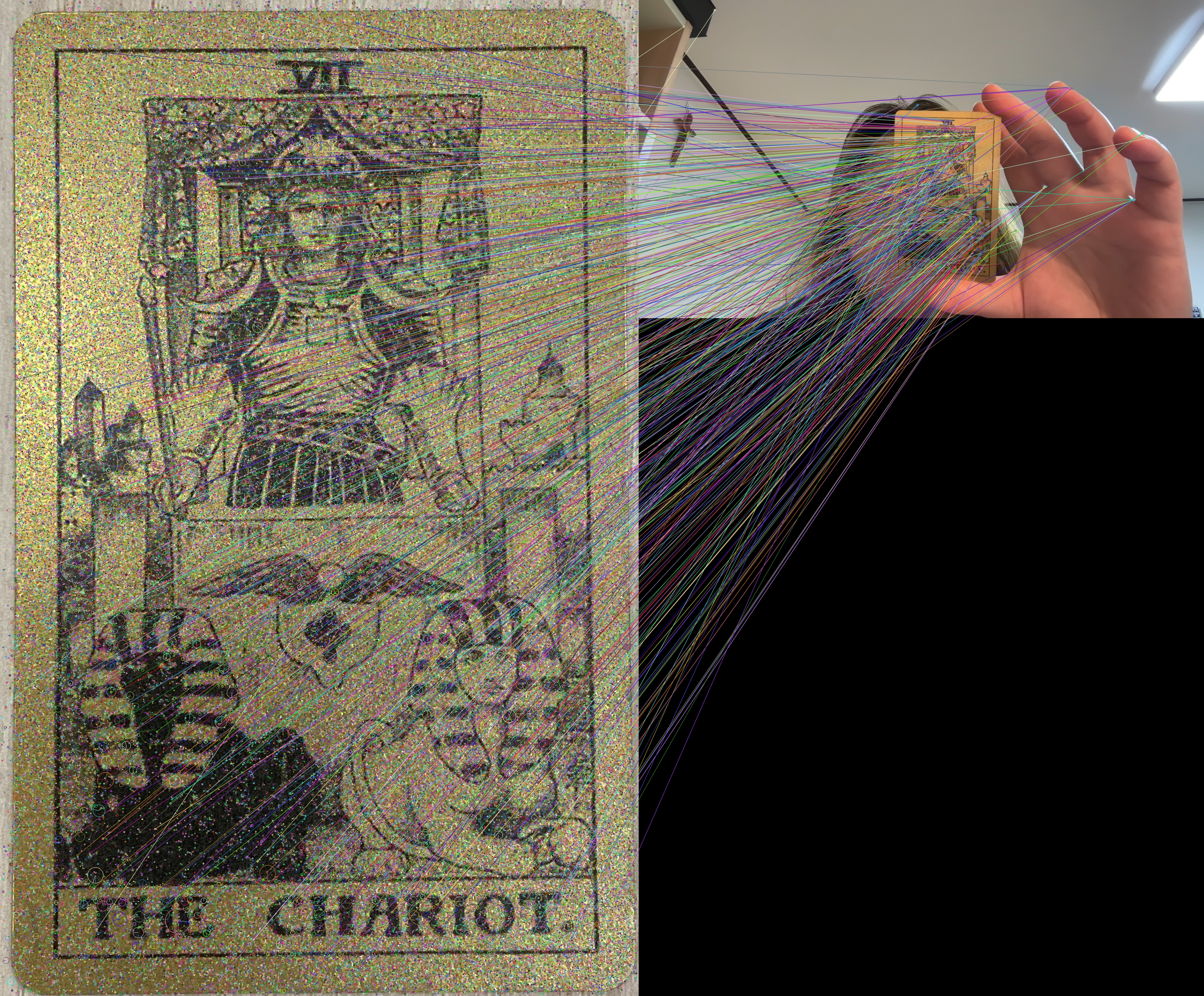
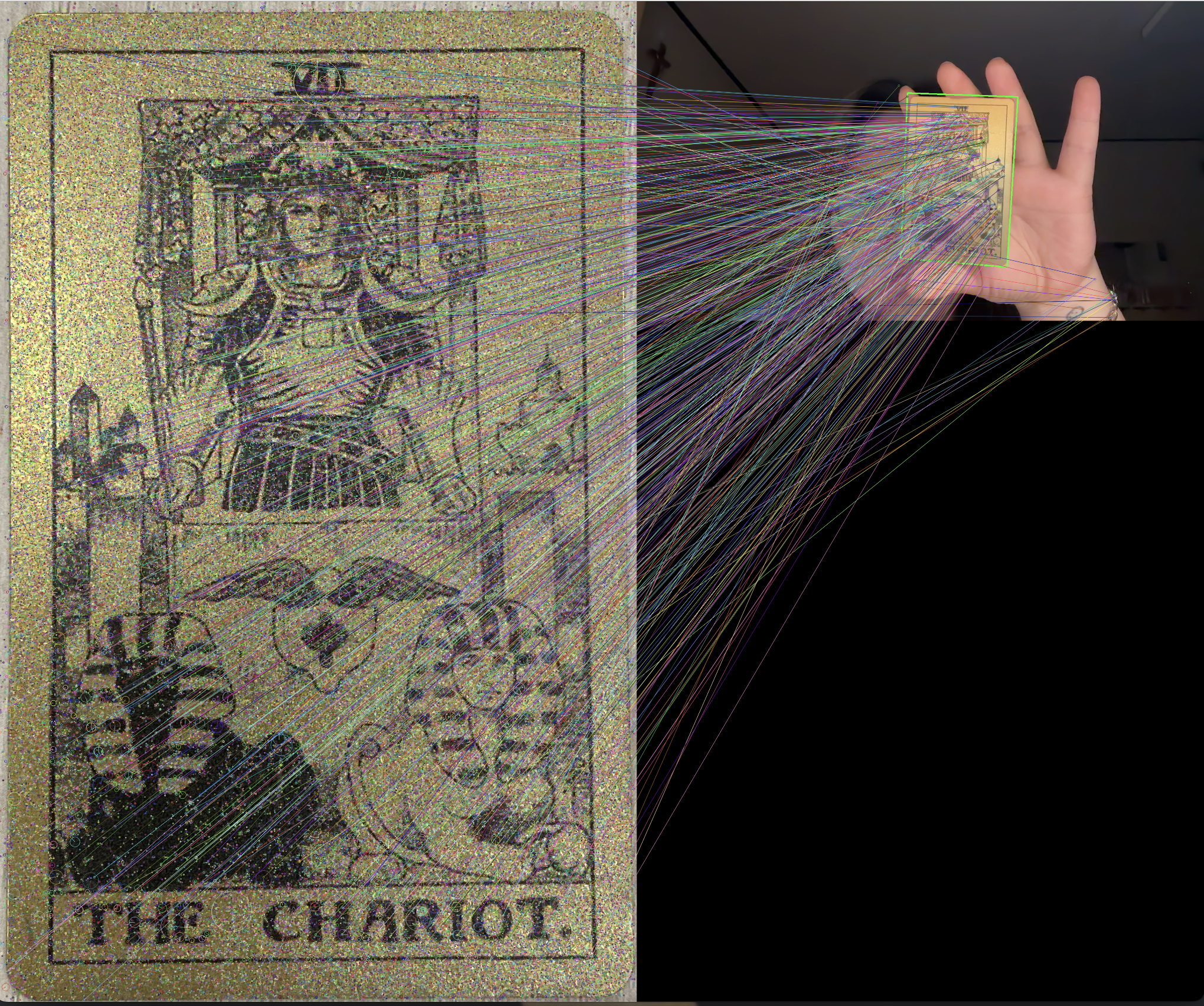
We can see the matching result between the marker image and real-time video.
However, some incorrect matches can also be observed. To address this, the
findHomography()function is used, which calculates the transformation matrix using the indices of selected descriptor matching pairs. This process is refined using the RANSAC algorithm.Then, add a rectangle is drawn on the video to represent the transformation, aligning with the four corner points of the marker image.
Compute Homography
cap = cv2.VideoCapture(0)
bf = cv2.BFMatcher()
while True:
ret, frame = cap.read()
if not ret:
print("Failed to capture frame from webcam. Exiting.")
break
gray_frame = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
keypoints_frame, descriptors_frame = sift.detectAndCompute(gray_frame, None)
matches = bf.knnMatch(descriptors_marker, descriptors_frame, k=2)
good_matches = []
for m, n in matches:
if m.distance < 0.75 * n.distance:
good_matches.append(m)
#compute Homography
if len(good_matches) > 10:
src_pts = np.float32([keypoints_marker[m.queryIdx].pt for m in good_matches]).reshape(-1, 1, 2)
dst_pts = np.float32([keypoints_frame[m.trainIdx].pt for m in good_matches]).reshape(-1, 1, 2)
H, mask = cv2.findHomography(src_pts, dst_pts, cv2.RANSAC, 5.0)
if H is not None:
h_marker, w_marker = gray_marker_image.shape
corners_marker = np.float32([
[0, 0],
[w_marker, 0],
[w_marker, h_marker],
[0, h_marker]
]).reshape(-1, 1, 2)
transformed_corners = cv2.perspectiveTransform(corners_marker, H)
frame = cv2.polylines(frame, [np.int32(transformed_corners)], isClosed=True, color=(0, 255, 0), thickness=3)
else:
print("Not enough matches to calculate Homography.")
match_visual = cv2.drawMatches(
marker_image, keypoints_marker,
frame, keypoints_frame,
good_matches, None,
flags=cv2.DrawMatchesFlags_NOT_DRAW_SINGLE_POINTS
)
cv2.imshow('Matching Results', match_visual)
if cv2.waitKey(1) & 0xFF == 27:
print("ESC pressed. Exiting.")
break
cap.release()
cv2.destroyAllWindows()
Marker Overlay
cap = cv2.VideoCapture(0)
bf = cv2.BFMatcher()
while True:
ret, frame = cap.read()
if not ret:
print("Failed to capture frame from webcam. Exiting.")
break
gray_frame = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
keypoints_frame, descriptors_frame = sift.detectAndCompute(gray_frame, None)
matches = bf.knnMatch(descriptors_marker, descriptors_frame, k=2)
good_matches = [m for m, n in matches if m.distance < 0.75 * n.distance]
if len(good_matches) > 10:
src_pts = np.float32([keypoints_marker[m.queryIdx].pt for m in good_matches]).reshape(-1, 1, 2)
dst_pts = np.float32([keypoints_frame[m.trainIdx].pt for m in good_matches]).reshape(-1, 1, 2)
H, mask = cv2.findHomography(src_pts, dst_pts, cv2.RANSAC, 5.0)
if H is not None:
h_marker, w_marker, _ = marker_image.shape
warped_marker = cv2.warpPerspective(marker_image, H, (frame.shape[1], frame.shape[0]))
#create the overlay mask
marker_mask = cv2.warpPerspective(
np.ones((h_marker, w_marker, 3), dtype=np.uint8),
H,
(frame.shape[1], frame.shape[0])
).astype(bool)
frame[marker_mask] = warped_marker[marker_mask]
else:
print("Homography calculation failed.")
else:
print("Not enough matches to calculate Homography.")
cv2.imshow('Marker Overlay', frame)
if cv2.waitKey(1) & 0xFF == 27:
print("ESC pressed. Exiting.")
break
cap.release()
cv2.destroyAllWindows()
Compare performance : ORB vs SIFT
marker_image = cv2.imread('chariot.jpg', cv2.IMREAD_COLOR)
gray_marker_image = cv2.cvtColor(marker_image, cv2.COLOR_BGR2GRAY)
orb = cv2.ORB_create()
sift = cv2.SIFT_create()
keypoints_orb, descriptors_orb = orb.detectAndCompute(gray_marker_image, None)
keypoints_sift, descriptors_sift = sift.detectAndCompute(gray_marker_image, None)
cap = cv2.VideoCapture(0)
bf = cv2.BFMatcher()
print("Press 's' to start matching. Press 'ESC' to quit.")
#wait until the real-time video prepared
while True:
ret, frame = cap.read()
if not ret:
print("Failed to capture frame from webcam. Exiting.")
break
cv2.imshow("Press 's' to start", frame)
key = cv2.waitKey(1) & 0xFF
if key == ord('s'): # start by pressing 's'
print("Starting real-time matching...")
break
elif key == 27:
print("ESC pressed. Exiting.")
cap.release()
cv2.destroyAllWindows()
exit()
performance_data = []
while True:
ret, frame = cap.read()
if not ret:
print("Failed to capture frame from webcam. Exiting.")
break
gray_frame = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
for algo_name, detector, descriptors_marker in [("ORB", orb, descriptors_orb), ("SIFT", sift, descriptors_sift)]:
start_time = time.time()
keypoints_frame, descriptors_frame = detector.detectAndCompute(gray_frame, None)
if descriptors_frame is None or descriptors_marker is None:
good_matches_count = 0
else:
matches = bf.knnMatch(descriptors_marker, descriptors_frame, k=2)
good_matches = [m for m, n in matches if m.distance < 0.75 * n.distance]
good_matches_count = len(good_matches)
elapsed_time = time.time() - start_time
performance_data.append({
"Algorithm": algo_name,
"Matches": good_matches_count,
"Processing Time (s)": elapsed_time
})
match_visual = cv2.drawMatches(
marker_image, keypoints_orb if algo_name == "ORB" else keypoints_sift,
frame, keypoints_frame,
good_matches, None,
flags=cv2.DrawMatchesFlags_NOT_DRAW_SINGLE_POINTS
)
cv2.imshow(f'Matches ({algo_name})', match_visual)
if cv2.waitKey(1) & 0xFF == 27:
print("ESC pressed. Exiting.")
break
cap.release()
cv2.destroyAllWindows()
df = pd.DataFrame(performance_data)
print(df.groupby("Algorithm").mean())
Matches Processing Time (s)
Algorithm
ORB 3.461538 0.016121
SIFT 1110.538462 0.886560
Result
ORB
- On average, only about 3 matches were successfully performed.
- ORB is fast, but its matching performance is likely to be poor.
SIFT
- On average, about 1110 matches were successfully performed.
- SIFT provides strong matching performance and shows high reliability.
ORB is fast but has low matching performance. However, in real-time situations, the processing speed is fast. On the other hand, SIFT provides high matching performance and reliability, but the processing speed is slow. In real-time detection situations, the processing speed can be felt to be slow.
Conclusion
- Successfully implemented real-time matching using SIFT and
findHomography. - Verified matching accuracy by visualizing keypoints, calculating Homography for transformation, and overlaying the marker image onto the detected region.
- Integrated a robust filtering mechanism to ensure only good matches are used for accurate detection.
Through this project, I gained practical experience in utilizing OpenCV for real-time image matching. I also deepened my understanding of detectors and descriptors, such as SIFT and ORB, and how they impact the accuracy and efficiency of image matching.